News
Congrats Yifu!

Fall 2023
Congrats to Yifu Luo on his graduation!MS Projects Available
Fall 2023
We have several MS projects available to students with a strong background in programming and/or mechanics.
Annual Barrels Society Meeting
November 2023
Prof. Hartmann attended the 36th Annual Barrels Meeting this November in Baltimore, MD.
Conference at Janelia
September 2023
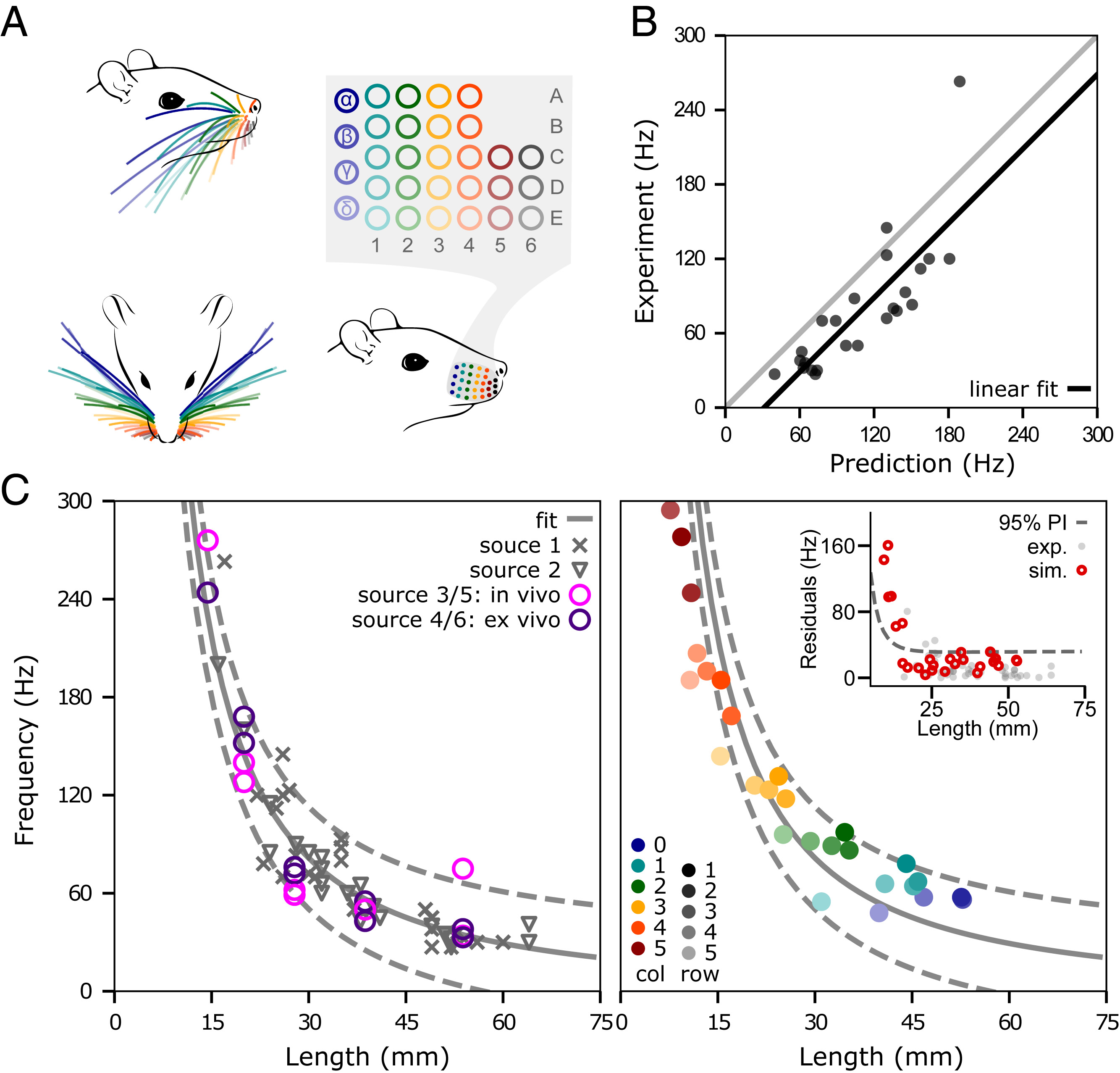
Prof. Hartmann attended a conference at Janelia -- Simulated Bodies: Whole Body Biomechanical Models.Quantifying the facial and whisker morphology of the mouse
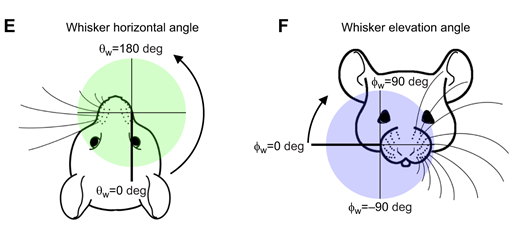
Summer 2023
Happy to announce the acceptance of our paper quantifying the facial and whisker morphology of the mouse. Find the publication here. Congratulations to Chris Bresee, Hayley Belli, and Yifu Luo!On the intrinsic curvature of animal whiskers
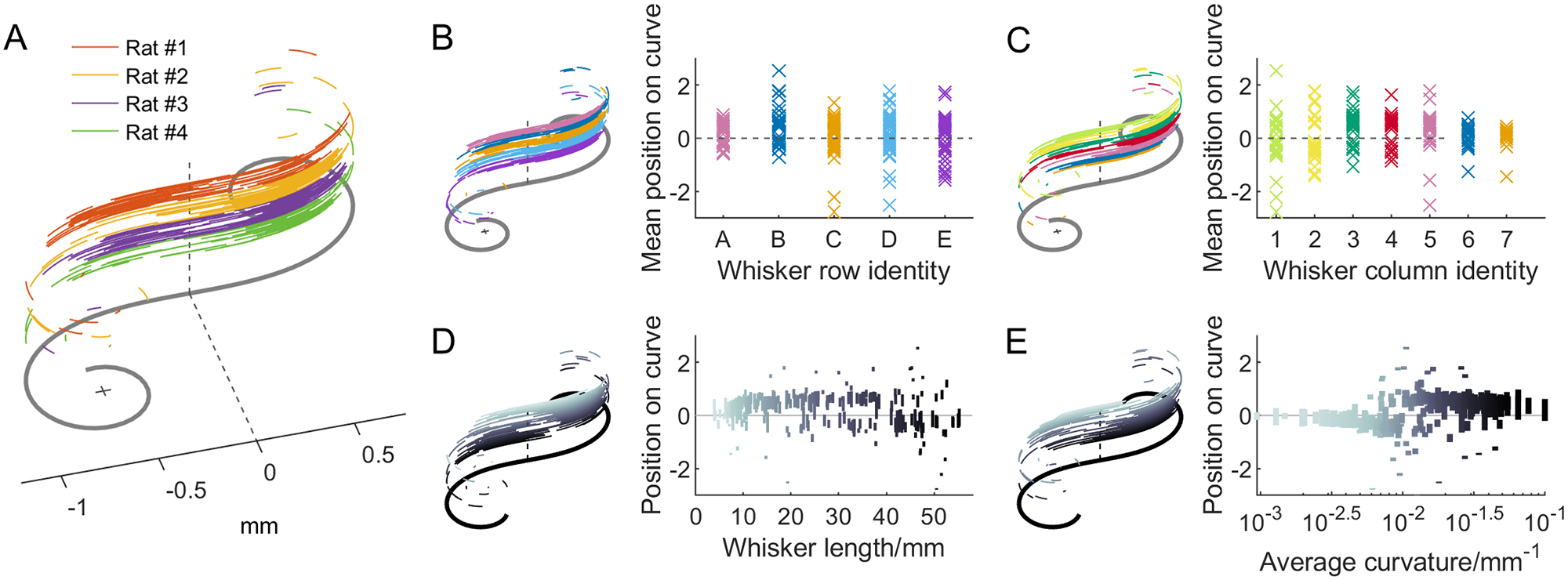
January 2023
Luo Y, Hartmann MJZ (2023) On the intrinsic curvature of animal whiskers. PLoS One 18: e0269210Congrats to the lab's 2022 PhD grads!
2022
Nadina Zweifel, Hannah Emnett, Schnaude Dorizan, and Admir Resulaj have all graduated and have moved on to exciting new adventures.
Nick's article published in PNAS
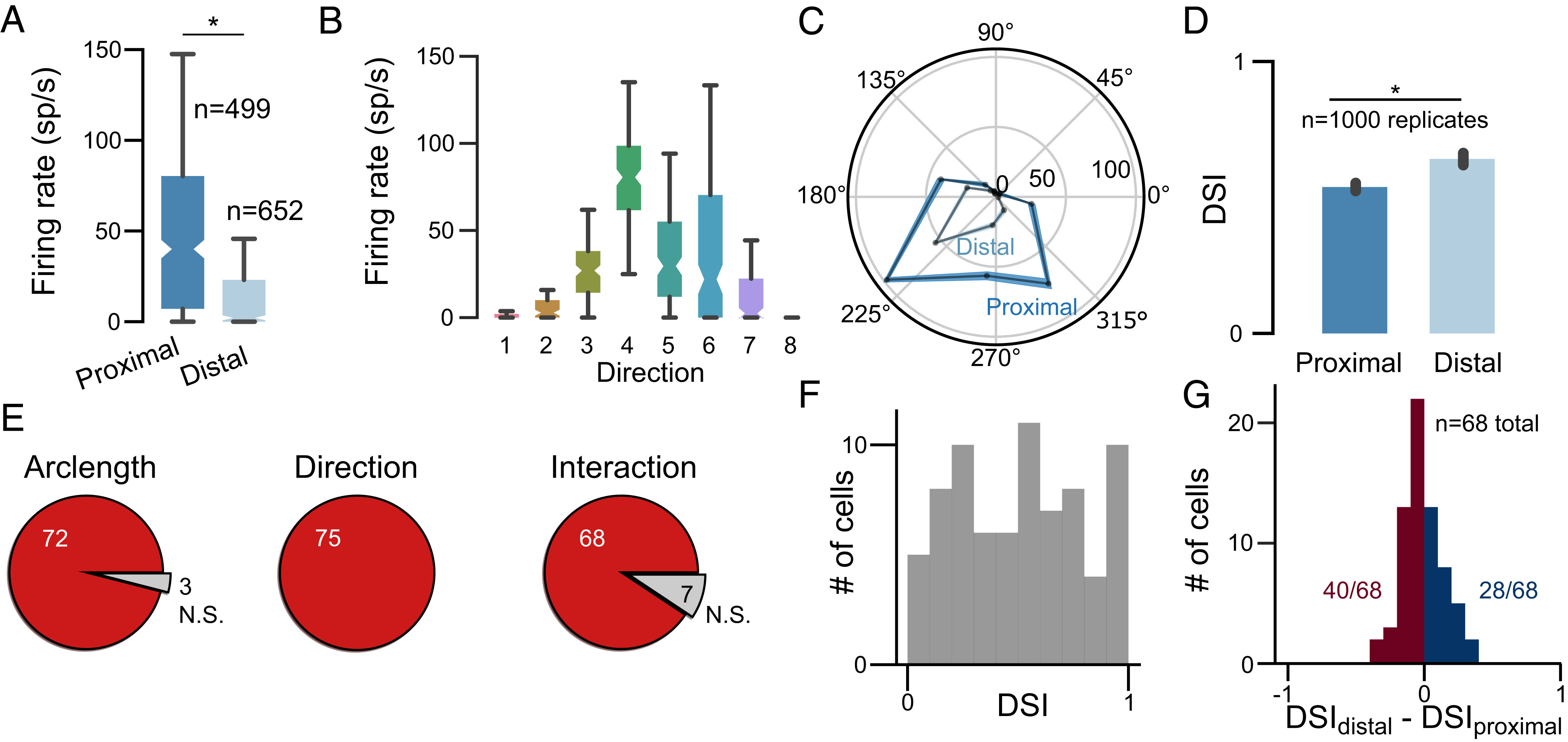
Summer 2021
"Continuous, multidimensional coding of 3D complex tactile stimuli by primary sensory neurons of the vibrissal system". Read it here.
Nadina's article published in PNAS